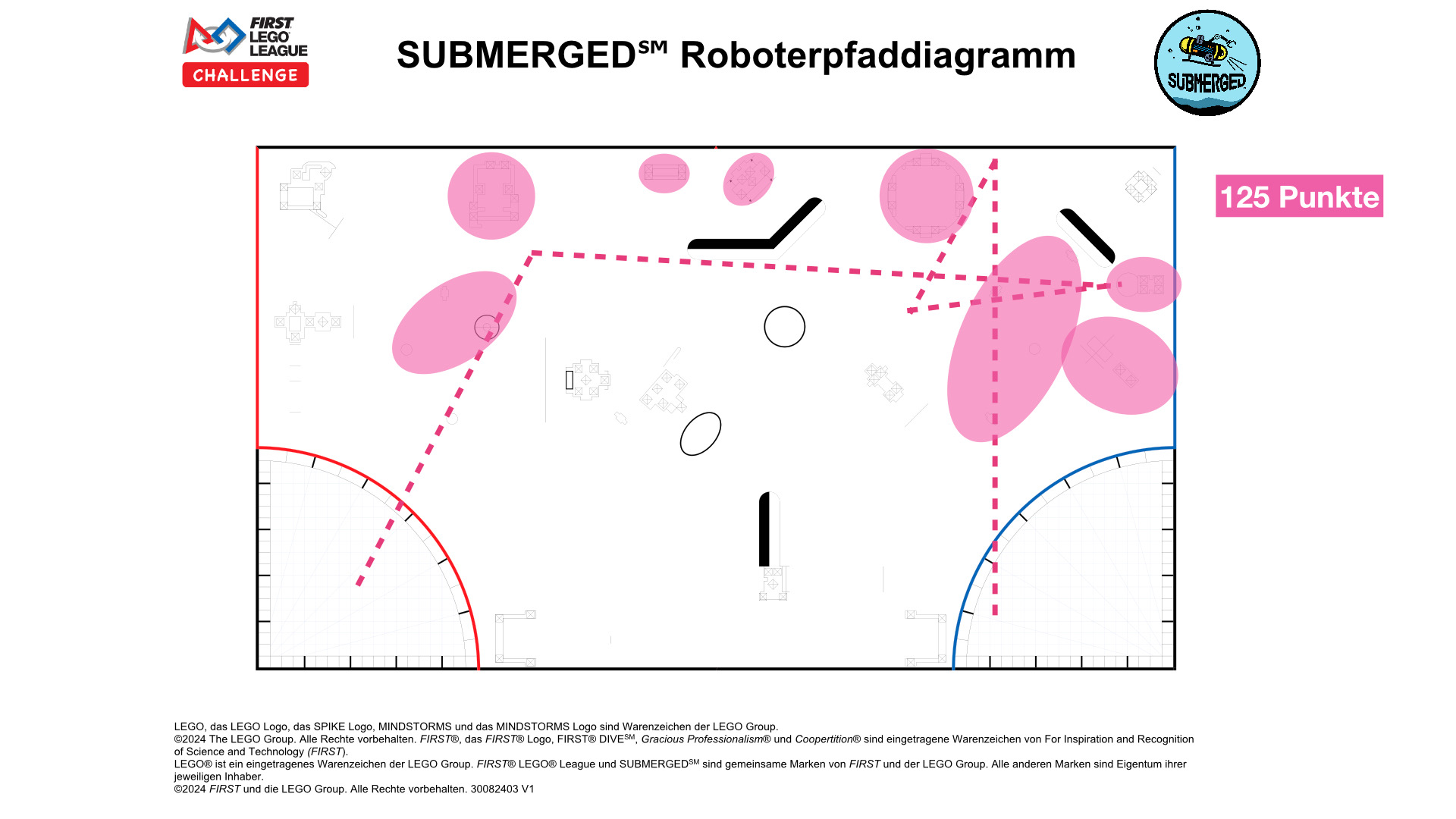
async def großerSammellauf(): # Lauf1
motor.reset_relative_position(D,0) #motor reset
await drehen(-8,R) #zum Schiff drehen
await gyrofahren2(500,-8,38.5) #alt 28 #
#await gyrofahrenexp(-8,38) #alt 28
await motor.run_to_relative_position(D,180,500) # arm links hoch
motor.stop(D)
await motor.run_for_degrees(hub.port.C,410,360) # arm rechts ausfahren #vorrher: 350
await drehen(-2,SB,200)
await gyrofahren2(700,-2,37.5) # fahren bis Walsonar # vorher: 37.5->39
await motor.run_for_degrees(hub.port.C,-790,360) # walsonar drehen #-700
await gyrofahren2(-500,0,13) #zurück #13->15->13
await motor.run_for_degrees(hub.port.C,-270,360) # arm einfahren #-400
await motor.run_for_degrees(hub.port.C,420,1000) # neues Einfahren #180
await drehen(-135,SB,200,500,7000) # vorher 105 #hindrehen --> besser für Krill fangen
await gyrofahren2(-600,-135,5)
await drehen(-90,R) # gerade hinstellen
await gyrofahren2(-600,-90,17.5) # zurück zur Planktonprobe #17.5->16
#await drehen(-85,R)# Sicherheitsdrehung
#await drehen(-90,L)# zurück
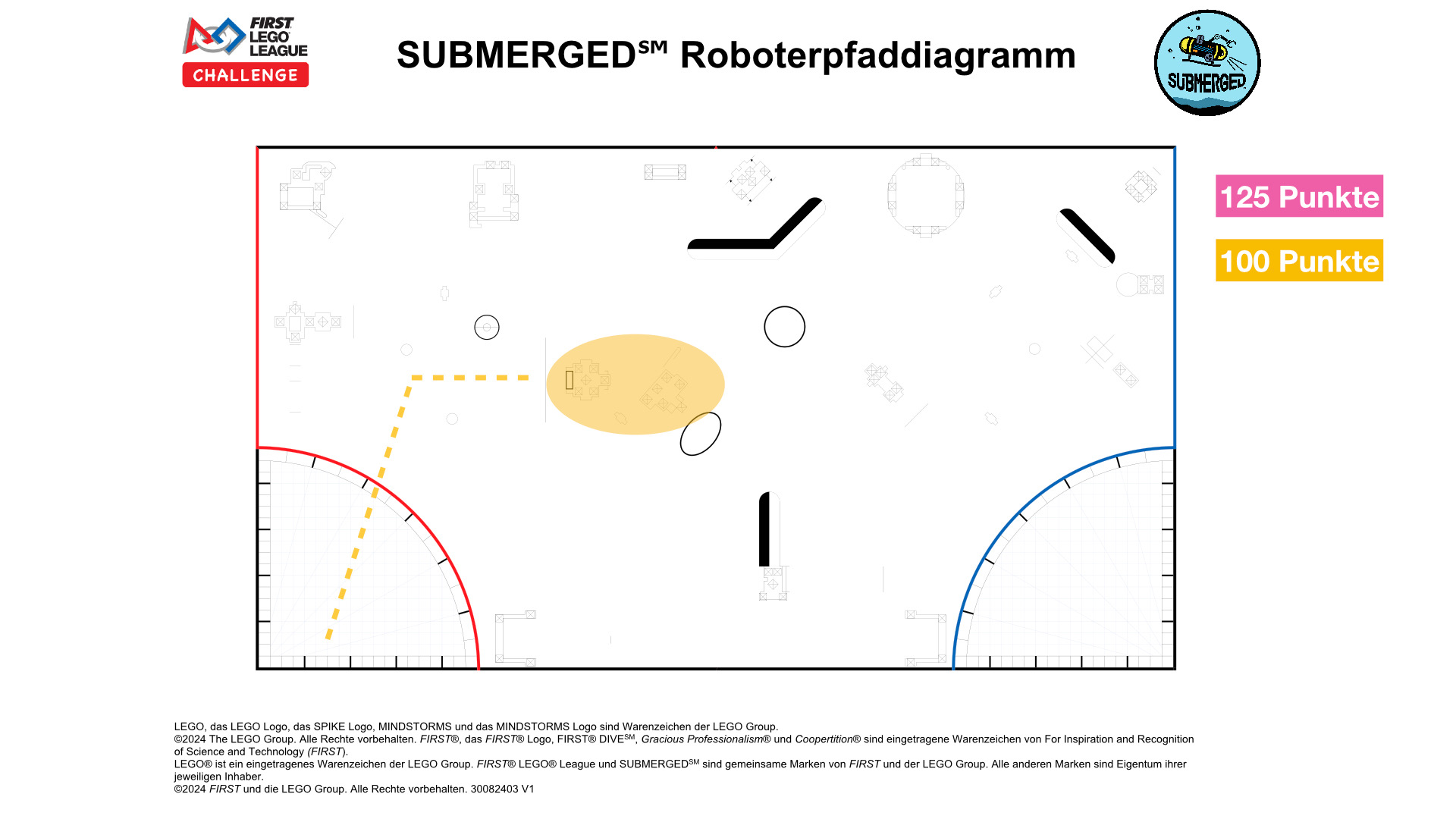
await runloop.sleep_ms(200)
await gyrofahren2(700,-90,22) # fahren zur Bodenprobe # nachher 90
await gyrofahren2(700,-89,72) # fahren zur Bodenprobe # nachher 90 #71->72
#await gyrofahrenexp(-91,92) # fahren zur Bodenprobe # nachher 90
#await motor.run_for_degrees(hub.port.D,90,360) # arm runter für Bodenprobe
await motor.run_to_relative_position(D,-20,250) # vorher -20
await motor.run_to_relative_position(D,160,300) # arm hoch
#await gyrofahren2(700,-90,) # weiterfahren
await drehen(-100) # drehen zur Wasserprobe
await gyrofahren2(700,-100,38) # weiterfahren
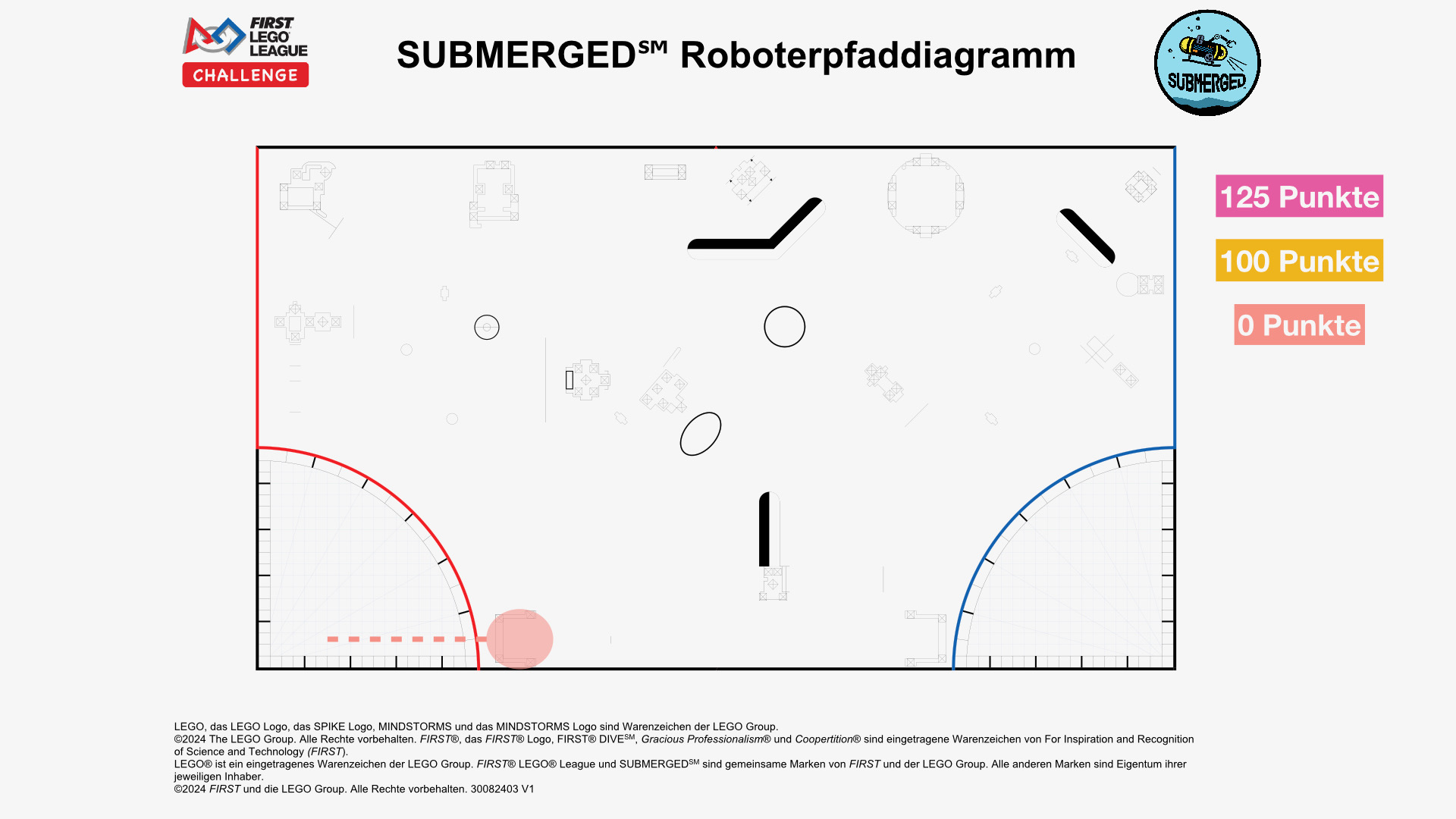
await motor.run_to_relative_position(D,-20,700)# Korallenzucht?
await motor.run_to_relative_position(D,170,300)# arm hoch
await drehen(-165)
await gyrofahren2(700,-165,30) # weiterfahren
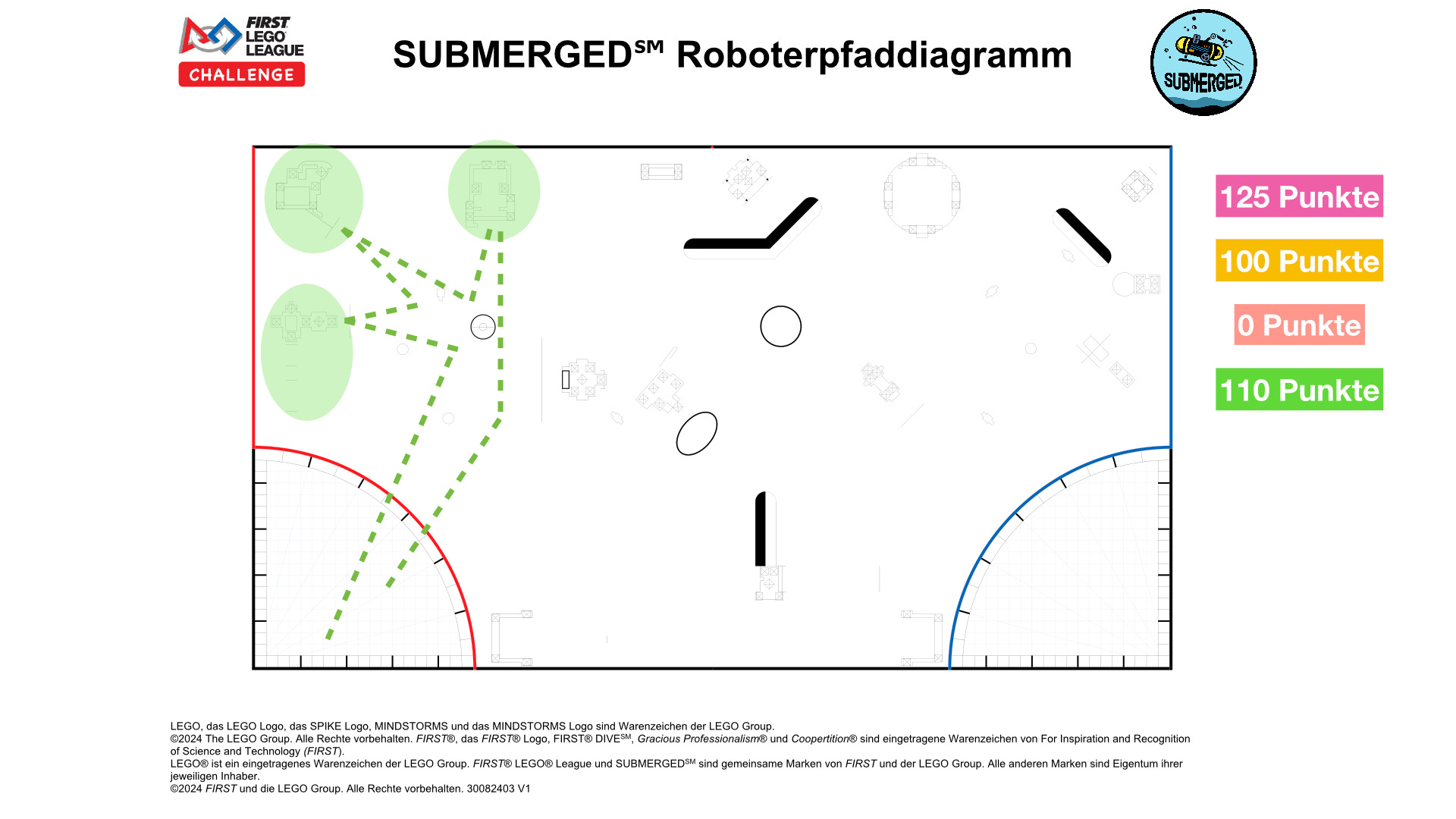
await drehen(-140) #zum Ziel drehen
await gyrofahren2(700,-140,40) # am Ziel